sito

sito

sito

sito

sito


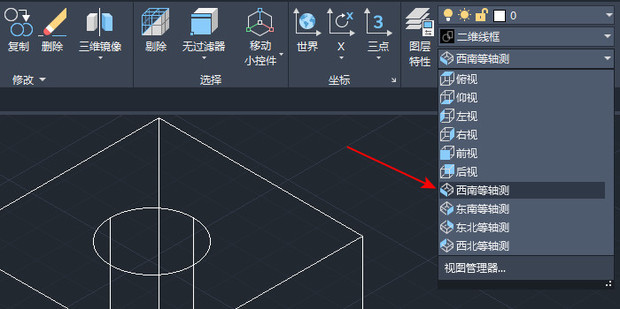
立体框标注通常基于多源三维数据进行。最常见的输入包括激光雷达(LiDAR)点云、RGB-D相机深度图、双目视觉重建点云以及单目图像结合深度估计模型生成的伪点云。在点云数据中,标注员通过旋转、缩放视角,在三维空间中手动调整立方体的中心坐标(x, y, z)、尺寸(长、宽、高)及偏航角(yaw),使其紧密包裹目标物体;在图像-点云融合场景中,还需确保2D边界框与3D框投影一致。标注结果通常以标准格式输出,如KITTI、NuScenes或自定义JSON结构,包含类别、位置、尺寸、朝向等字段。
确保立体框标注质量需满足四大核心要求:空间贴合度、尺寸准确性、朝向一致性与类别规范性。空间贴合度要求立方体紧密包围目标物体,避免过大包含背景或过小遗漏关键部分;尺寸准确性强调长、宽、高参数应真实反映物体物理尺度;朝向一致性指同类物体(如车辆)的朝向定义需统一(通常以行驶方向为基准);类别规范性则依赖清晰的分类体系,明确处理遮挡、截断、小目标等边缘情况。为保障执行效果,专业项目通常设置多视角校验、交叉审核与专家仲裁机制。
信息来源:网易伏羲
 固话
固话 地址
地址 微信
微信 邮箱
邮箱 0832-2112880
0832-2112880