sito

sito

sito

sito

sito


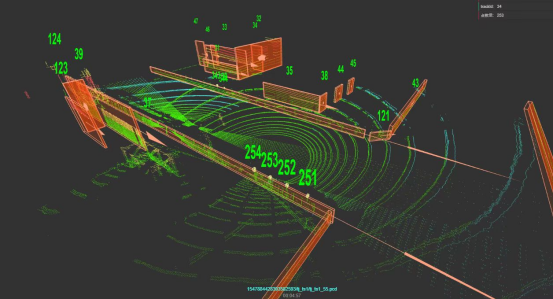
根据不同的应用需求,3D点云标注主要分为以下几种类型:
1.3D目标检测:这是最常见的一种方式。用三维立方体(3D Bounding Box)将目标物体(如一辆车、一个行人)完整地框出来,并标注其类别、中心点坐标、长宽高尺寸以及朝向角度(航向角)。
2.语义分割:这是最精细的标注方式之一。需要为点云中的每一个点都赋予一个类别标签(如道路、车辆、植被、建筑),实现对场景的像素级理解。
3.实例分割:在语义分割的基础上,进一步区分同一类别中的不同个体。例如,不仅要识别出所有的“车辆”,还要区分出“车A”和“车B”,即使它们挨得很近。
4.连续帧标注:这是3D点云标注的进阶和难点。它要求在连续的多帧点云序列中,为同一个运动目标(如一辆正在行驶的汽车)始终标注同一个唯一ID,并记录其运动轨迹。
 固话
固话 地址
地址 微信
微信 邮箱
邮箱 0832-2112880
0832-2112880