sito

sito

sito

sito

sito


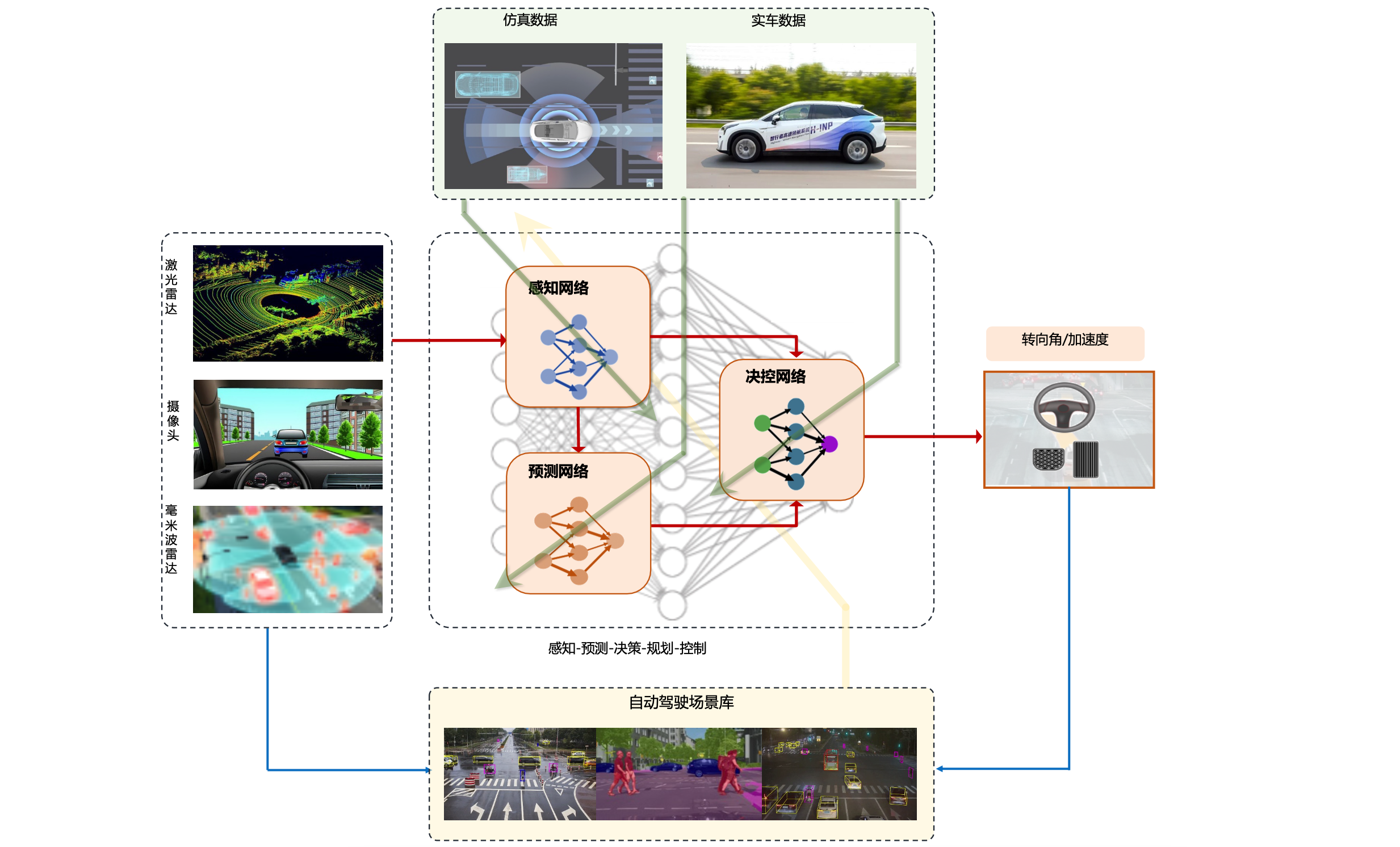
数据标注之智能驾驶数据集根据传感器类型与任务需求可分为多种类型。图像标注是最基础的形式,针对摄像头采集的二维图像,标注人员需框选出车辆、行人、非机动车、交通信号灯、交通标志和车道线等目标,并赋予相应类别标签。对于交通信号灯,还需标注其颜色状态;对于车道线,需标记其类型(实线、虚线)与曲率变化。此类标注用于训练基于视觉的物体检测与语义分割模型。
点云标注针对激光雷达采集的三维点云数据,要求在三维空间中精确标注目标物体的边界框,包括长、宽、高和朝向信息。与二维图像相比,点云标注能提供更精确的距离与空间结构信息,有助于模型判断物体的远近、大小与运动轨迹。在复杂场景中,需处理点云遮挡、稀疏分布等问题,确保标注的完整性与准确性。
多传感器融合标注将摄像头、激光雷达和毫米波雷达的数据进行时空对齐,实现跨模态联合标注。同一目标在不同传感器中的表现被关联起来,形成更全面的环境描述。此类标注用于训练融合感知模型,提升系统在单一传感器失效或性能下降时的鲁棒性。
行为与意图标注针对动态目标,如车辆和行人,标注其运动轨迹、速度变化和潜在行为意图。例如,标注车辆是否准备变道、行人是否准备横穿马路。此类标注用于训练预测模型,使自动驾驶系统能够预判周围交通参与者的行为,提前规划应对策略。
场景分类标注对整段驾驶视频或数据片段进行宏观标记,如“城市道路”“高速公路”“隧道”“施工区域”或“恶劣天气”。此类标注用于数据集管理与模型训练策略制定,确保模型在各类典型场景下均有充分训练。
信息来源:网易伏羲
 固话
固话 地址
地址 微信
微信 邮箱
邮箱 0832-2112880
0832-2112880